Give us a call on 01903 861431 or send us an e-mail


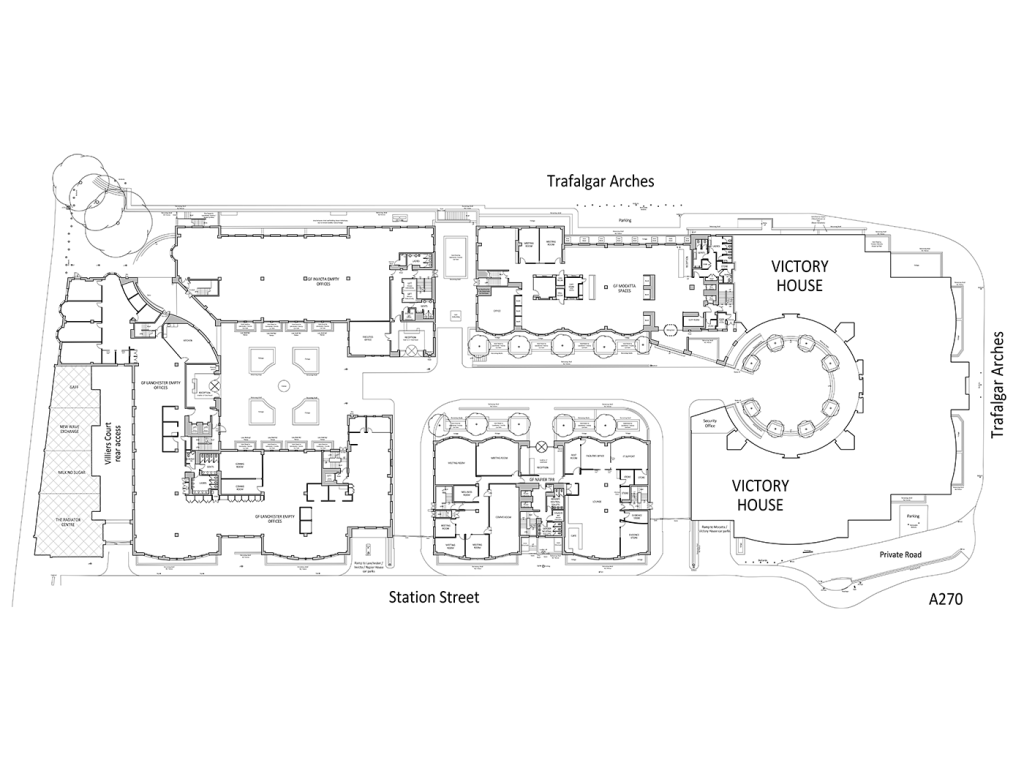
Working for the landlord of Trafalgar Place in Brighton, we were initially asked to carry out a measured building survey and to produce general arrangement plans of Lanchester House and Invicta House.
The scope of work gradually grew to include surveys of Mocatta House, Napier House, and two car parks, as well as the preparation of an estate plan and a Building Information Model (BIM) of Napier House.
With an internal area of over 34,000 m2, spread over 35 floors and four buildings (including car parks), collecting data across such a large and active site posed a significant logistical challenge.
Having office space occupied by 132 separate tenants further compounded the issue, with access to several of these spaces restricted for security reasons or other concerns.
We established a site control network using our Trimble Total Station (±1mm in 300m), traversing the roads in and out of the site and recording control targets at the ground and roof levels of each building. This ensured that all scan data could be gathered without misalignment errors that can be inherent to tall buildings.
The survey was primarily completed using the latest GeoSLAM Horizon handheld 3D laser scanner, allowing us to set up and survey areas in a non-linear sequence as access became available according to each tenant’s requirements. As a mobile scanner, the Horizon could swiftly outpace static laser scanners and reach areas unsuitable for tripods.
A photographic survey of the site was completed using our Ricoh Theta 360 camera to provide reference for our quality control team when checking the accuracy of drawings. This information was also delivered to the client to show the site conditions during the survey.
The measured building survey was completed in stages over several weeks as areas became accessible, with provisional drawings issued to the client as required.
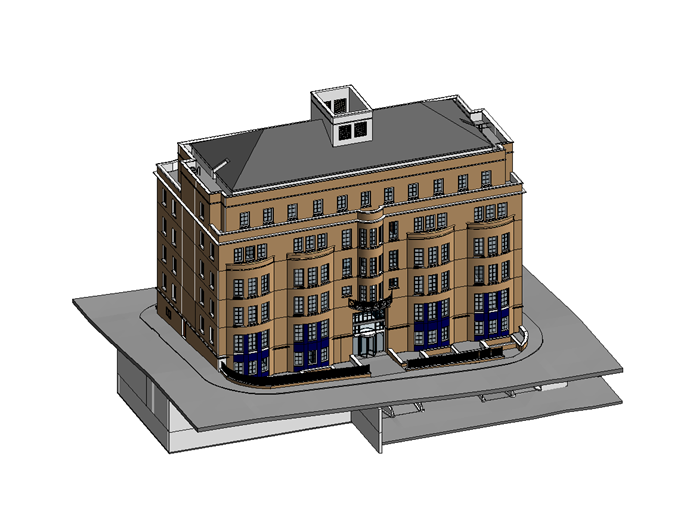
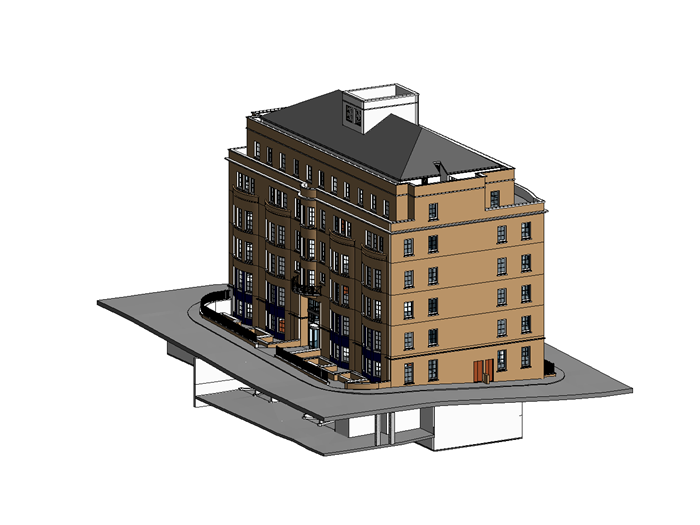
The client requested a BIM model of Napier House several months later, and following a two hour resurvey of previously inaccessible areas, we were able utilise our scan data to provide them with a LOD 300 (Level of Development) Revit model.
Archidata Limited
The Design Studio
94 High Street
Steyning
West Sussex
BN44 3RD
T: 01903 861431
Get in touch
Designed by Day 1
![]() © 2026 Archidata Limited. All rights reserved.
© 2026 Archidata Limited. All rights reserved.
Registered in England and Wales: Company No. 09970131.
Full Member No. 208 of The Survey Association
Participating member of The Survey Association's Continuing Company Development Scheme